|
Abstract
The goal of the project wildCENSE is to create a network of sensor collars to monitor the micro-climatic conditions and behaviour
of Indian Nilgai (Boselaphus tragocamelus). The project intends to develop collars having five sensors namely position (GPS
Receiver), temperature, humidity, head orientation and light to observe the aforementioned parameters for the animal. These
are driven by a microcontroller which records the input from these sensors after specified intervals of time, and writes it
in the data flash. This is later transmitted using a radio transceiver. The power requirements would be met by a battery attached
to the node, which would be recharged by solar cells. One such collar would be deployed on one animal in a herd of Nilgai,
so that the information about the entire group could be taken from a single node. The considerations of establishment of network,
transmission of data, design and positioning of antennas have also been addressed as a part of the project.
Sensor Node Developed
As a part of the project, the devices available in the institute have been integrated to form the proof of concept sensor
node. Several field tests have also been conducted to verify that the basic goals of the system are acheived.
The system software developed for the sensor node provides for the functionality of different read frequencies for different
sensors and the configurability of the same, selection of sensors, taking the microcontroller and the different peripherals
to the sleep mode when they are not in use. It also maintains a system clock which is updated using the GPS timing signals.
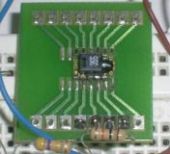
A photograph of the node developed can be seen here.

Components integrated
|

|
|

|
|
Navman Jupiter GPS Receiver
|
SHT11 Temperature & Humidity Sensor
|
MMA6270Q Accelerometer
|
The GPS receiver used for the project is Conexant Jupiter TU30-D410-041 GPS module now known as Navman Jupiter GPS board.
The receiver is connected to an antenna through an OSX connector. The output of the GPS is fixed at 4800 bps, 8 data bits
and 1 stop bit. The data from the receiver was read on the UART of the microcontroller using the NMEA 4800 8N1 message format.
The GPS antenna needs to see the sky to able to determine the position, and it takes around 60 seconds for it to find the
first fix.
Sensirion SHT11 is the single chip relative humidity and temperature multi sensor module used for the project.It has been
interfaced using a proprietary TWI which is not supported by ATmega 32. This made it necessary to program the microcontroller
to send the appropriate pulses on data and clock lines of the sensor through the I/O pins of the microcontroller. To start
communicating with SHT11 or to receive temperature or humidity values from it requires sending specific pulse sequence to
be sent on data and clock lines.
As a part of the project goal, it is intended to track the orientation of the head of the animal. This can be achieved
by measuring the tilt of the sensor node from static acceleration using low-g and high-sensitivity accelerometer. The accelerometer
used in the project is MMA6270Q. The two outputs XOUT and YOUT were connected to two ADC channels of ATmega32.
|